

Revisar literatura recomendada
13/01/2025
Cómo los UAV y la Computación en el Borde Móvil Transforman las Redes Moderna
En un mundo cada vez más interconectado, tecnologías como la computación en el borde móvil (MEC) y los vehículos aéreos no tripulados (UAV) están revolucionando la provisión de servicios en redes modernas. Estas herramientas, combinadas con algoritmos avanzados de inteligencia artificial, no solo optimizan la eficiencia energética y la calidad del servicio, sino que también prometen transformar industrias clave al proporcionar soluciones más rápidas y sostenibles.
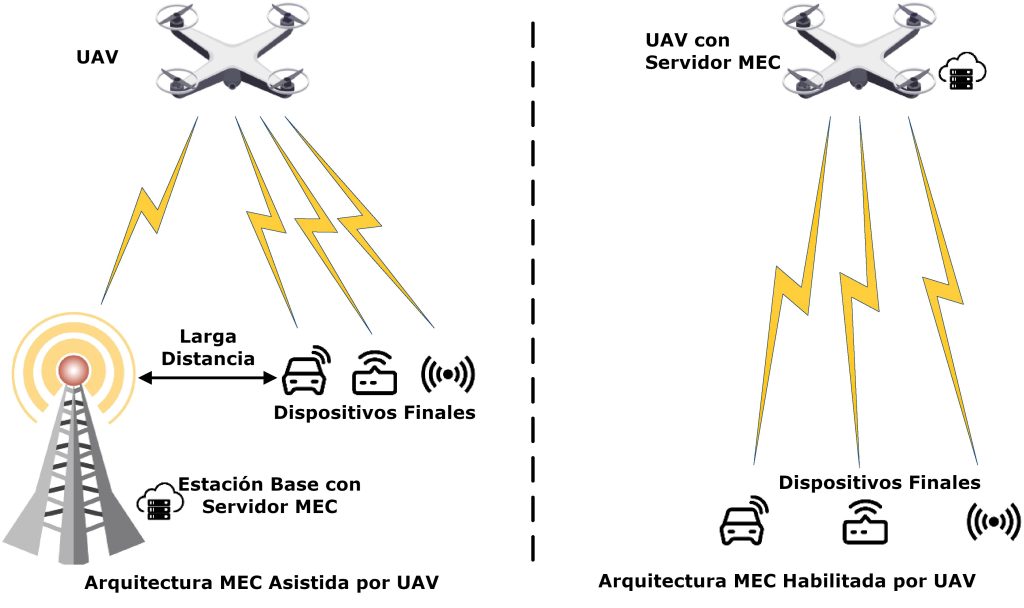
La computación en el borde móvil, (MEC, Mobile Edge Computing), asistida y habilitada por vehículos aéreos no tripulados, (UAV, Unmanned Aerial Vehicles), ha emergido como una solución innovadora para abordar los desafíos de provisión de servicios en redes modernas. Al delegar tareas computacionales a servidores MEC, los dispositivos finales pueden acceder a servicios de alta calidad mientras reducen significativamente su consumo energético (You et al., 2017). En este contexto, los UAV desempeñan un papel clave al ofrecer capacidades de computación y procesamiento confiables y de baja latencia a dispositivos con recursos limitados, ya sea transportando servidores MEC o conectándose directamente a ellos. La arquitectura MEC habilitada por UAV ha sido objeto de extensa investigación académica, como se ilustra en la Figura 6 (Yazid et al., 2021). No obstante, debido a la limitada capacidad energética de los UAV, resulta esencial optimizar la descarga computacional, la transmisión de datos, las trayectorias de vuelo y la asignación de recursos para maximizar tanto la eficiencia energética como la calidad del servicio.
Aprendizaje por Refuerzo en la Optimización de Redes MEC
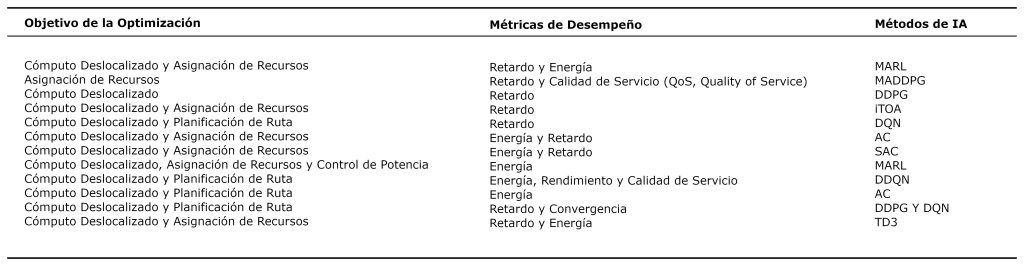
El aprendizaje por refuerzo (RL, Reinforcement Learning) se ha consolidado como una herramienta eficaz para superar las limitaciones técnicas previamente mencionadas en el contexto dinámico de la arquitectura MEC habilitada por UAV. Al permitir la toma de decisiones en tiempo real basadas en el entorno, el RL optimiza el rendimiento general de la red, facilita una gestión más eficiente de los recursos y ofrece soluciones innovadoras a problemas complejos. La Tabla IV resume los principales objetivos de optimización, las métricas de rendimiento y los métodos de inteligencia artificial (AI, Artificial Intelligence) aplicados a los UAV en la provisión de servicios de red.
Estrategias para Mejorar la Calidad del Servicio con UAV
En términos de calidad de servicio (QoS, Quality of Service), los UAV deben enfocarse en mejorar las estrategias para medir y optimizar parámetros clave, como la reducción de la latencia y la ampliación del alcance de los servicios de red. Entre las estrategias fundamentales se encuentran la planificación de trayectorias, la asignación eficiente de recursos y la descarga de tareas de cómputo, todas esenciales para alcanzar estos objetivos. Además, garantizar la equidad en la asignación de recursos y maximizar el rendimiento global del sistema son factores críticos para evitar el desperdicio de recursos. Por ejemplo, en el estudio de Zhu et al. (2021), se equiparon UAV con capacidades de cómputo para funcionar como servidores de borde, colaborando con estaciones base terrestres en el procesamiento de tareas provenientes de dispositivos en tierra. En dicho trabajo, se propusieron algoritmos de aprendizaje por refuerzo multiagente (MARL, Multiagent Reinforcement Learning), que optimizan de manera conjunta la asignación de recursos computacionales y de ancho de banda, reduciendo significativamente los tiempos de respuesta bajo restricciones energéticas. Este enfoque utiliza dos agentes independientes para gestionar la asignación de tareas y el ancho de banda, y demuestra ser superior al aprendizaje por refuerzo de agente único.
Investigaciones recientes han explorado el uso de UAV y estaciones base equipadas con servidores MEC para ofrecer servicios a redes vehiculares dinámicas (Peng & Shen, 2020). En este contexto, se propone un esquema basado en el algoritmo de gradiente de política determinista profunda multiagente (MADDPG, Multiagent Deep Deterministic Policy Gradient) para gestionar recursos multidimensionales y satisfacer las demandas de aplicaciones con procesamiento computacional intensivo y alta sensibilidad a la latencia. Este enfoque optimiza la gestión de tareas de descarga, maximizando el número de procesos atendidos mientras se cumplen los requisitos de calidad de servicio (QoS).
Por otro lado, Wang et al. (2021) analizan sistemas MEC asistidos por UAV, donde los drones, controlados por un servidor MEC, ofrecen servicios de descarga a equipos de usuario (User Equipment, UE). En este escenario, los dispositivos UE pueden descargar parte de sus tareas de procesamiento al UAV mientras ejecutan el resto localmente. Para resolver este problema, se emplean algoritmos basados en el gradiente de política determinista profunda (DDPG, Deep Deterministic Policy Gradient), que permiten tomar decisiones óptimas en entornos multiusuario asistidos por un único UAV.
Se tiene que admitir, que la integración de UAV con servidores MEC y el uso de algoritmos avanzados de inteligencia artificial, como RL, MARL, y DDPG, constituyen una dirección prometedora para enfrentar las deficiencias y limitaciones técnicas asociados a la provisión de servicios de red en entornos complejos y dinámicos. Estas tecnologías no solo mejoran la eficiencia operativa y la calidad del servicio, sino que también tienen el potencial de transformar significativamente la industria y beneficiar a los usuarios finales al ofrecer soluciones más rápidas, flexibles y sostenibles en un mundo cada vez más interconectado.
Integración de UAV y Redes SAGIN para un Futuro Interconectado
En este contexto, los Vehículos Aéreos No Tripulados (UAV, Unmanned Aerial Vehicles) se han integrado como componentes clave en redes como SAGIN (Space-Air-Ground Integrated Network) y SAG-IoT (Space-Air-Ground Internet of Things), gracias a su capacidad de movilidad y adaptabilidad para proporcionar servicios de red y capacidades de procesamiento computacional en el borde. Estas redes se benefician de algoritmos avanzados, como el Algoritmo de Política Profunda Determinística (DDPG, Deep Deterministic Policy Gradient) y el Algoritmo de Redes Neuronales Profundas de Q-Learning (DQN, Deep Q-Network), que no solo mejoran la latencia y la convergencia, sino que también optimizan el uso de los recursos computacionales y energéticos. Además, el desarrollo de técnicas como el Algoritmo Inteligente de Descarga de Tareas (iTOA, intelligent Task Offloading Algorithm), basado en la Búsqueda Profunda de Monte Carlo (MCTS, Monte Carlo Tree Search), ha demostrado su efectividad para resolver problemas complejos de asignación de recursos y planificación de trayectorias, como se señala en Chen et al. (2020).
Modelos de Computación en el Borde de Tres Niveles con UAV
Por otra parte, en escenarios de descarga de los resultados procesados para asistir redes de computación en el borde con múltiples UAV, se ha propuesto la integración de servidores MEC (Mobile Edge Computing) transportados por UAV. Esto permite la ejecución de tareas localmente, en los servidores MEC o en servidores en la nube, dependiendo de las condiciones dinámicas del sistema. Por ejemplo, un sistema de computación en el borde de tres niveles descrito por Wan et al. (2020) organiza sensores que generan datos en el primer nivel, UAV que transportan servidores MEC para procesamiento inicial en el segundo nivel, y un centro de operaciones para procesamiento final en el tercer nivel. En este modelo, la planificación de rutas mediante algoritmos como DQN, junto con la optimización de Lyapunov, ha mostrado una reducción significativa en la latencia, maximizando así la eficiencia de la red.
Asimismo, se ha identificado que la eficiencia energética de los UAV está estrechamente vinculada con su tiempo de servicio efectivo, lo que motiva la investigación en técnicas avanzadas de planificación de trayectorias, control de potencia y métodos eficientes de descarga de los resultados del procesamiento computacional en redes como SAGIN. En este tipo de redes, los recursos heterogéneos y las condiciones dinámicas plantean retos significativos, como lo aborda Cheng et al. (2019), donde se propone una arquitectura SAG-IoT que integra UAV con servidores MEC y satélites conectados a la nube. Para resolver problemas de asignación de recursos y programación de tareas, se han empleado enfoques como la planificación de enteros mixtos y algoritmos heurísticos, que, en combinación con esquemas basados en Aprendizaje por Refuerzo Actor-Crítico (RL-AC, Actor-Critic Reinforcement Learning), logran una descarga de tareas más eficiente en términos de latencia y consumo energético en comparación con métodos aleatorios y codiciosos.
Asimismo, es importante destacar que las tecnologías mencionadas, junto con el diseño de arquitecturas avanzadas y algoritmos inteligentes, están transformando las redes de computación en el borde al ofrecer soluciones flexibles y eficientes para escenarios complejos. Estas innovaciones no solo mejoran el rendimiento y la adaptabilidad de las redes, sino que también sientan las bases para un futuro en el que la computación distribuida y la conectividad ubicua impulsen el desarrollo de la Industria y el bienestar de los usuarios al brindar servicios más rápidos, confiables y energéticamente sostenibles.
Desafíos en el Uso de UAV y Soluciones Basadas en IA
El uso de vehículos aéreos no tripulados, (UAV, Unmanned Aerial Vehicles), en entornos de procesamiento computacional en el borde móvil, (MEC, Mobile Edge Computing), ha generado un interés creciente debido a su capacidad para mejorar la eficiencia en la realización de tareas computacionales y la comunicación inalámbrica. Estos sistemas combinan la movilidad y flexibilidad de los UAV con la potencia de procesamiento local de los servidores MEC, permitiendo abordar desafíos críticos en términos de latencia, consumo de energía y calidad del servicio, (QoS, Quality of Service). En este contexto, diversos estudios han explorado algoritmos avanzados basados en aprendizaje por refuerzo y optimización para maximizar el rendimiento del sistema, garantizar la eficiencia energética y enfrentar las limitaciones físicas de los UAV.
En este sentido, se propone una colaboración entre UAV y servidores MEC para procesar tareas de procesamiento computacional proporcionadas por los usuarios. Un algoritmo AC suave, SAC (Soft Actor-Critic), es implementado para optimizar decisiones de descarga y asignación de recursos en sistemas con múltiples usuarios y servidores, reduciendo la latencia, el consumo energético y el tamaño de las tareas descartadas (Li et al., 2021). Por otro lado, Liu et al. (2022) analizan los aspectos económicos de los sistemas MEC asistidos por UAV, modelando el equipo del usuario (UE, User Equipment), los costos y los ingresos asociados con los UAV. Para ello, se emplean algoritmos MARL (Multi-Agent Reinforcement Learning) que permiten controlar de forma conjunta la potencia, la asignación de recursos y las decisiones de descarga, logrando un menor consumo de energía del sistema y optimizando los ingresos operativos de los UAV.
Además, se introducen algoritmos basados en redes neuronales profundas dobles Q (DDQN, Double Deep Q-Network) para maximizar el rendimiento del sistema mientras se consideran las restricciones de energía de los UAV y los requisitos de QoS de los usuarios en tierra (Liu et al., 2020). En un método similar, Wang et al. (2022) utilizan un algoritmo AC (Actor-Critic) para optimizar las trayectorias de los UAV, pero con el objetivo principal de minimizar el consumo energético de los usuarios. Ambos estudios destacan las ventajas de los UAV equipados con servidores MEC en escenarios con usuarios móviles, aunque con diferencias en los objetivos de optimización y métricas de parámetros de evaluación.
Soluciones a Escala: Algoritmos Jerárquicos para UAV
A pesar de los avances mencionados, en entornos de mayor complejidad, como los sistemas MEC a gran escala, se enfrenta el desafío del llamado «desastre dimensional». Este problema surge debido al crecimiento exponencial del espacio de estados y acciones al incorporar múltiples UAV. Para abordar esta dificultad técnica, Ren et al. (2022) proponen un algoritmo de optimización jerárquica de trayectorias y descargas, conocido como HT3O (Hierarchical Trajectory and Task Offloading Optimization). Este enfoque combina los algoritmos DDPG (Deep Deterministic Policy Gradient) y DQN, permitiendo una optimización alternada y eficiente de trayectorias y tareas. Los resultados obtenidos muestran una rápida convergencia y una reducción significativa en la latencia promedio de las tareas, destacando la eficacia de esta solución frente a los algoritmos convencionales de aprendizaje por refuerzo (RL, Reinforcement Learning).
Por su parte, Zhao et al. (2022) exploran escenarios dinámicos en los que múltiples UAV colaboran para asistir en el procesamiento computacional y realizar descargas adicionales hacia la nube periférica. En este caso, emplean algoritmos multiagente TD3 (Twin Delayed Deep Deterministic Policy Gradient), diseñados para optimizar de manera conjunta las trayectorias de los UAV, las tareas de descarga de los resultados del procesamiento computacional y la asignación de recursos. Este método permite reducir tanto la latencia del sistema como el consumo energético, consolidándose como una solución eficiente en escenarios dinámicos y de alta complejidad.
Por lo tanto, la integración de UAV en sistemas MEC representa un avance significativo para atender las crecientes demandas de procesamiento y comunicación en entornos complejos. Las soluciones propuestas en las investigaciones, basadas en algoritmos avanzados de optimización y aprendizaje por refuerzo, no solo permiten superar limitaciones técnicas, sino que también ofrecen nuevas oportunidades para mejorar la calidad de los servicios. Estas tecnologías son fundamentales para impulsar el desarrollo de aplicaciones emergentes, maximizando el bienestar de los usuarios y fortaleciendo la eficiencia y sostenibilidad en diversas industrias.
No se puede pasar por alto cómo la Inteligencia Artificial (AI, Artificial Intelligence) se ha consolidado como un componente esencial para potenciar las capacidades de las redes de Vehículos Aéreos No Tripulados (UAV, Unmanned Aerial Vehicles). Su integración no solo ha permitido un incremento significativo en el rendimiento de estos sistemas, sino que también les ha otorgado la capacidad de tomar decisiones autónomas, lo que les permite adaptarse de manera flexible a los cambios del entorno en tiempo real. No obstante, a pesar del notable avance en el uso de la AI para optimizar servicios basados en UAV, su aplicación enfrenta una serie de desafíos tecnológicos específicos, particularmente en el contexto del Internet de las Cosas asistido por UAV (IoT, Internet of Things). Entre estas limitaciones se encuentran problemas relacionados con el entrenamiento de algoritmos, la convergencia en escenarios complejos y el manejo eficiente de grandes volúmenes de datos.
En cuanto a los problemas de entrenamiento y convergencia, el uso de algoritmos de AI, en particular los de Aprendizaje por Refuerzo, RL (Reinforcement Learning), ha sido objeto de un interés considerable en redes de comunicación. Sin embargo, estos algoritmos requieren grandes volúmenes de datos para su entrenamiento, lo que puede ser difícil de obtener en la práctica. Además, los datos recopilados a menudo presentan problemas como redundancia, errores en las etiquetas o un desequilibrio en las clases, lo que afecta significativamente la calidad del entrenamiento (Bithas et al., 2019). Para mitigar estas barreras, la ampliación de datos se ha establecido como una técnica clave, ya que genera nuevos datos basados en conjuntos existentes, evitando así problemas como el sobreajuste y facilitando la convergencia de los algoritmos.
Aprendizaje Federado y Seguridad en Redes UAV
El Aprendizaje Federado, FL (Federated Learning), ha surgido como una solución prometedora en este contexto que estamos analizando, al ejecutar algoritmos de Aprendizaje Automático, ML (Machine Learning), de manera descentralizada. Esta tecnología permite la actualización de parámetros de los modelos mediante la interacción de modelos locales y globales, lo que resulta especialmente útil para resolver problemas relacionados con datos de entrenamiento desequilibrados. Por ejemplo, un UAV con datos limitados puede beneficiarse del entrenamiento realizado por otros UAV, mejorando así la efectividad del modelo en escenarios de colaboración (Shiri et al., 2020; Zhao et al., 2022).
Adicionalmente, en escenarios a gran escala, los algoritmos de AI suelen enfrentar dificultades de convergencia debido a la complejidad de las tareas asignadas. En estos casos, los métodos de aprendizaje iterativo alterno son una opción eficiente para reducir dicha complejidad y facilitar la convergencia de los algoritmos (Ren et al., 2022). No obstante, las investigaciones en este ámbito aún están en desarrollo, y se requieren mejoras adicionales para responder de manera eficiente a escenarios dinámicos y diversos.
En los últimos años, las Redes Neuronales de Gráficos, GNN (Graph Neural Networks), han demostrado ser una herramienta eficaz para abordar estas adversidades, especialmente en entornos de gran escala. Esta perspectiva utiliza un mecanismo de paso de mensajes similar al de los algoritmos de optimización distribuida, lo que permite mejorar el análisis de datos y reducir tanto los parámetros de red como la complejidad computacional (Wu et al., 2021). A este respecto, Wang et al. (2022) propusieron un método basado en redes GNN para abordar la optimización conjunta de la ubicación de UAV y la selección de rutas de retransmisión en redes a gran escala. Esta estrategia no solo logra un rendimiento equiparable al de escenarios de redes más pequeñas, sino que también ofrece una escalabilidad destacable al adaptarse a entornos dinámicos mientras mantiene una rápida convergencia.
Redes Neuronales Gráficas en la Optimización de UAV
Los recientes avances en tecnologías como el Federated Learning (FL) y las Redes Neuronales Gráficas (Graph Neural Networks, GNN) ofrecen soluciones prometedoras para abordar los desafíos relacionados con el entrenamiento, la gestión de datos y la convergencia en redes de UAV asistidas por inteligencia artificial. Estas innovaciones no solo incrementan la eficiencia y autonomía de los UAV, sino que también establecen una base sólida para el desarrollo de sistemas más robustos y flexibles en escenarios de gran escala. En este contexto, la implementación continua y la evolución de estas tecnologías resultan fundamentales para impulsar el progreso de la industria, optimizar los servicios disponibles y, en última instancia, ofrecer a los usuarios soluciones más avanzadas e inteligentes.
Es oportuno considerar, que los Vehículos Aéreos no Tripulados (UAV, Unmanned Aerial Vehicles) se han consolidado como herramientas clave en una amplia gama de aplicaciones. Desde el monitoreo ambiental hasta la entrega de mercancías, destacando por su versatilidad y su capacidad para operar en entornos complejos. No obstante, su funcionamiento enfrenta desafíos técnicos significativos, especialmente en términos de recursos y consumo energético. Además, estas limitaciones se agravan al incorporar tecnologías avanzadas como la Inteligencia Artificial (IA, Artificial Intelligence) y la Computación en el Borde Móvil (MEC, Mobile Edge Computing). Aunque estas tecnologías ofrecen capacidades superiores en procesamiento de datos y toma de decisiones, también generan un aumento considerable en el consumo energético, así como en los recursos computacionales necesarios para su operación. Por lo tanto, resulta fundamental abordar las restricciones energéticas asociadas y optimizar la eficiencia de estas tecnologías. Solo de esta manera será posible garantizar un despliegue eficaz, sostenible y funcional de los UAV en escenarios prácticos.
En este contexto, diversos estudios han abordado estrategias para mitigar el consumo energético de los UAV mientras se maximizan sus capacidades operativas. Por ejemplo, Mondal et al. (2022) lograron una reducción significativa en el consumo de energía mediante la optimización simultánea de la trayectoria del UAV y la potencia de transmisión, lo que se traduce en una mejora en la eficiencia de la recolección de datos. Por otro lado, Cheng et al. (2019) diseñaron una estrategia de optimización conjunta de la asignación de recursos y la programación de tareas, logrando así minimizar el consumo de energía general del sistema. En paralelo, se han propuesto algoritmos ligeros de Inteligencia Artificial que pueden ejecutarse eficientemente en dispositivos con recursos limitados, tales como las Redes Neuronales de Grafos o algoritmos de aprendizaje distribuido, que permiten generar soluciones adaptadas para redes con restricciones computacionales (Michailidis et al., 2020).
Asimismo, se ha investigado la adaptabilidad dinámica de los algoritmos como solución a estas limitaciones. Un ejemplo destacado es la propuesta de una Red Neuronal Dinámica desarrollada por Ma et al. (2022), la cual emplea una base de conocimiento para ajustar de forma flexible el ancho de la red según las demandas específicas del servicio. Este enfoque permite modificar dinámicamente la complejidad del modelo, optimizando la relación entre el uso de recursos, el rendimiento y el consumo energético.
Por otra parte, se han implementado algoritmos de Inteligencia Artificial en el control de este tipo de redes, logrando adaptar su capacidad a las necesidades específicas de cada tarea. Como resultado, se ha mejorado significativamente la eficiencia en el uso de los recursos disponibles y se ha reducido el consumo de energía.
Además, se ha identificado que tanto los avances en hardware como las estrategias de integración entre software y hardware son factores clave para posibilitar la ejecución de algoritmos avanzados de Inteligencia Artificial en vehículos aéreos no tripulados (UAV), donde los recursos computacionales y energéticos son limitados.
Sostenibilidad y Eficiencia Energética en UAV Inteligente
A pesar de los desafíos, la integración de tecnologías como la Inteligencia Artificial y la Computación en el Borde Móvil en los UAV representa un avance significativo para ampliar sus capacidades y aplicaciones. Superar las limitaciones energéticas y computacionales es un requisito esencial para garantizar una implementación sostenible. Por ello, el desarrollo de algoritmos ligeros, técnicas de optimización de recursos y soluciones tecnológicas innovadoras se ha convertido en un factor clave para lograr un rendimiento eficiente. Estas tecnologías no solo impulsan el progreso en la industria aeroespacial y de los UAV, sino que también abren nuevas oportunidades para mejorar servicios esenciales y promover el bienestar de los usuarios finales en una amplia variedad de sectores.
El uso de Vehículos Aéreos No Tripulados (UAVs, Unmanned Aerial Vehicles) ha experimentado un notable crecimiento en los últimos años, impulsado por su bajo costo operativo y su capacidad para responder de manera rápida y eficaz en diversos escenarios. Este auge ha propiciado el desarrollo de un Internet de las Cosas (IoT, Internet of Things) asistido por UAVs, el cual integra tecnologías avanzadas de comunicación, procesamiento de datos e inteligencia artificial (AI, Artificial Intelligence). Con el soporte de innovaciones como la Computación en el Borde de Acceso Múltiple (MEC, Multi-access Edge Computing) y algoritmos de AI cada vez más sofisticados, los UAVs han evolucionado hacia sistemas más inteligentes y autónomos. Esto ha facilitado su integración en un amplio rango de aplicaciones, que van desde la vigilancia y el monitoreo ambiental hasta la gestión de redes de comunicación. No obstante, este avance también plantea superar importantes limitaciones técnicas y de seguridad, los cuales deben ser abordados para garantizar una implementación segura y eficiente en entornos reales.
En el contexto de la seguridad y privacidad, los UAV están expuestos a múltiples amenazas durante su operación. Entre estas amenazas se encuentran ataques como el secuestro y sabotaje de UAV, la interferencia en sus comunicaciones mediante suplantación de identidad y el espionaje de datos transmitidos. Dichas vulnerabilidades no solo comprometen la integridad y la seguridad de los UAV, sino que también pueden afectar su desempeño operativo, aumentando el riesgo de incidentes como colisiones. Además, durante el entrenamiento de modelos de AI que involucran UAV, la recopilación de datos desde múltiples nodos puede generar riesgos de filtración de información sensible, lo que subraya la importancia de implementar soluciones robustas de seguridad y privacidad en estos procesos.
En este marco, el Aprendizaje Federado (Federated Learning, FL) se ha consolidado como una tecnología prometedora para abordar los desafíos relacionados con la privacidad y la seguridad en el entrenamiento de inteligencia artificial (IA). Esta técnica permite construir modelos globales mediante el intercambio de parámetros en lugar de datos brutos, lo que reduce significativamente la transmisión de información sensible a través de la red y mejora la protección de los datos de los usuarios. Por ejemplo, el FL ha sido aplicado con éxito en áreas como el control de trayectorias de vehículos aéreos no tripulados (UAV) y la seguridad en redes, demostrando ser una solución eficaz para proteger los procesos de entrenamiento de IA (Mowla et al., 2020; Shiri et al., 2020). Sin embargo, esta metodología aún enfrenta importantes limitaciones técnicas, ya que el intercambio de parámetros del modelo durante el entrenamiento puede ser susceptible a ataques, como la inyección de datos anómalos que comprometen el rendimiento del modelo. Además, los ataques dirigidos por sistemas de aprendizaje federado tienen el potencial de propagarse por toda la red debido a la naturaleza colaborativa del proceso de entrenamiento.
Para mitigar estas vulnerabilidades, la integración de tecnologías como Blockchain con el Aprendizaje Federado (FL) ha recibido una creciente atención en los últimos años. El mecanismo de autenticación basado en Blockchain añade una capa adicional de seguridad al proteger la integridad de los datos y prevenir su manipulación durante el proceso de entrenamiento. Desde esta perspectiva, Wang et al. (2021) proponen una arquitectura de Aprendizaje Federado basada en Blockchain diseñada específicamente para vehículos aéreos no tripulados (UAV), logrando garantizar una mayor privacidad en los procesos de aprendizaje federado. Sin embargo, esta combinación tecnológica enfrenta aún diversas limitaciones, como los problemas de convergencia en el aprendizaje FL, derivados de las diferencias en la distribución de los datos entre los nodos participantes y las velocidades desiguales de actualización de los modelos, lo que puede ralentizar el proceso de aprendizaje. Además, aunque la implementación de Blockchain genera costos adicionales en términos de procesamiento computacional y almacenamiento, sigue siendo una línea de investigación clave para fortalecer la seguridad y privacidad en el uso de la inteligencia artificial (IA) y los UAV en el futuro (Tan et al., 2022).
No cabe duda de que los UAV están desempeñando un papel clave en el desarrollo del IoT asistido por UAV al proporcionar servicios de comunicación avanzados y ampliar las posibilidades de conectividad en entornos complejos. Sin embargo, la implementación de estas tecnologías enfrenta importantes dificultades técnicas relacionadas con las limitaciones inherentes a los recursos computacionales y energéticos de los UAV. Esto exige soluciones innovadoras que no solo respondan a estas restricciones, sino que también impulsen su adopción masiva en escenarios prácticos. Entre las estrategias más prometedoras se encuentran la inteligencia artificial (AI) distribuida, que ha demostrado su eficacia en aplicaciones reales, y en el desarrollo de algoritmos de AI, diseñados específicamente para optimizar el uso de los recursos disponibles. Estas herramientas no solo permiten una operación eficiente y sostenible de los UAV, sino que también garantizan altos niveles de rendimiento, adaptabilidad y seguridad, factores esenciales en el contexto del IoT.
En este sentido, la convergencia entre UAVs, IoT y AI no solo representa un hito en el campo de la innovación tecnológica, sino que también redefine las posibilidades en múltiples sectores industriales. Desde la logística y la agricultura de precisión hasta las telecomunicaciones y la gestión de emergencias, estas tecnologías están generando soluciones transformadoras que benefician tanto a las empresas como a los usuarios finales. Asimismo, tecnologías emergentes como el Aprendizaje Federado y Blockchain están ganando relevancia como pilares fundamentales en la protección de la privacidad y la seguridad de los datos, lo que fortalece la confianza en estos sistemas. En paralelo, la implementación de AI distribuida continúa abordando las limitaciones técnicas de los UAV, sentando las bases para un ecosistema tecnológico más eficiente y robusto. Este progreso no solo permitirá un desarrollo sostenible de estas tecnologías, sino que también facilitará su adopción segura y efectiva en una amplia gama de aplicaciones.
Además, es importante destacar que el desarrollo de estas tecnologías no se limita a la solución de problemas técnicos; también está abriendo nuevas fronteras en términos de sostenibilidad, conectividad y eficiencia energética. La integración de UAV, computación en el borde móvil (MEC) e inteligencia artificial está configurando el futuro de las redes inteligentes y de la computación distribuida. Estas innovaciones están diseñadas no solo para satisfacer las necesidades actuales, sino también para anticiparse a los desafíos de una sociedad cada vez más digital y conectada.
En última instancia, explorar el potencial de estas tecnologías será esencial para construir un futuro más sostenible, adaptativo, estable y flexible. Para lograrlo, será indispensable seguir invirtiendo en investigación y desarrollo, promoviendo la colaboración entre la industria, la academia y los gobiernos. Solo mediante un esfuerzo conjunto será posible maximizar las oportunidades que ofrecen los UAV, el IoT y la inteligencia artificial, y garantizar que sus beneficios lleguen a todos los sectores de la sociedad. Este camino no solo impulsará el progreso tecnológico, sino que también contribuirá a mejorar la calidad de vida de las personas, acercándonos cada vez más a un mundo verdaderamente conectado e inteligente.
La Convergencia Tecnológica: Inteligencia Artificial, UAVs e IoT Transformando el Futuro
En conclusión, este artículo ha explorado en profundidad los hallazgos de un destacado estudio académico titulado «AI for UAV-Assisted IoT Applications: A Comprehensive Review», publicado en el prestigioso IEEE Internet of Things Journal. La investigación, desarrollada por un equipo de reconocidos expertos —Nan Cheng, Shen Wu, Xiucheng Wang, Zhisheng Yin, Changle Li, Wen Chen y Fangjiong Chen—, proporciona un análisis exhaustivo sobre el papel crucial de la inteligencia artificial en las aplicaciones del Internet de las Cosas (IoT) potenciadas por vehículos aéreos no tripulados (UAV).
Este estudio, accesible bajo la licencia Creative Commons Attribution 4.0, permite su uso, distribución y adaptación libre, siempre que se otorgue el reconocimiento adecuado a los autores. Para más información sobre esta licencia, puede visitar el sitio oficial de Creative Commons Attribution 4.0.
La riqueza del análisis y el rigor científico que sustenta esta investigación la convierten en una referencia esencial para comprender cómo la convergencia de la inteligencia artificial, los UAV y el IoT está rediseñando los horizontes de la innovación tecnológica. Además de abordar los desafíos y oportunidades que surgen en esta intersección, el estudio identifica nuevas perspectivas y áreas de investigación que prometen redefinir el futuro de las tecnologías conectadas.
En un contexto global donde la integración de estas herramientas tecnológicas está revolucionando industrias y transformando nuestra relación con el mundo, investigaciones como esta resultan imprescindibles. No solo ofrecen un marco analítico para prever el impacto de estas transformaciones en la sociedad y la economía global, sino que también inspiran una visión de futuro en la que la tecnología y la creatividad humana se unen para explorar territorios sin precedentes.
Referencias Bibliográficas Recomendadas
Bithas, P. S., Michailidis, E. T., Nomikos, N., Vouyioukas, D., & Kanatas, A. G. (2019). A survey on machine-learning techniques for UAV-based communications. Sensors, 19(23), 5170.
Chen, J., Chen, S., Luo, S., Wang, Q., Cao, B., & Li, X. (2020). An intelligent task offloading algorithm (iTOA) for UAV edge computing network. Digital Communications and Networks, 6(4), 433–443.
Cheng, N., et al. (2019). Space/aerial-assisted computing offloading for IoT applications: A learning-based approach. IEEE Journal on Selected Areas in Communications, 37(5), 1117–1129.
Li, S., Hu, X., & Du, Y. (2021). Deep reinforcement learning for computation offloading and resource allocation in unmanned-aerial-vehicle assisted edge computing. Sensors, 21(19), 6499.
Liu, Q., Shi, L., Sun, L., Li, J., Ding, M., & Shu, F. (2020). Path planning for UAV-mounted mobile edge computing with deep reinforcement learning. IEEE Transactions on Vehicular Technology, 69(5), 5723–5728.
Ma, L., Cheng, N., Wang, X., Sun, R., & Lu, N. (2022). On-demand resource management for 6G wireless networks using knowledge-assisted dynamic neural networks. In Proceedings of the IEEE International Conference on Communications, 1–6.
Michailidis, E. T., Potirakis, S. M., & Kanatas, A. G. (2020). AI-inspired non-terrestrial networks for IIoT: Review on enabling technologies and applications. IoT, 1(1), 3.
Mondal, A., Mishra, D., Prasad, G., & Hossain, A. (2022). Joint optimization framework for minimization of device energy consumption in transmission rate constrained UAV-assisted IoT network. IEEE Internet of Things Journal, 9(12), 9591–9607.
Mowla, N. I., Tran, N. H., Doh, I., & Chae, K. (2020). AFRL: Adaptive federated reinforcement learning for intelligent jamming defense in FANET. KICS Journal of Communications and Networks, 22(3), 244–258.
Peng, H., & Shen, X. (2020). Multi-agent reinforcement learning based resource management in MEC-and UAV-assisted vehicular networks. IEEE Journal on Selected Areas in Communications, 39(1), 131–141.
Ren, T., Wang, L., Zhou, H., Zhao, D., & Li, Q. (2022). Enabling efficient scheduling in large-scale UAV-assisted mobile-edge computing via hierarchical reinforcement learning. IEEE Internet of Things Journal, 9(10), 7095–7109.
Shiri, H., Park, J., & Bennis, M. (2020). Communication-efficient massive UAV online path control: Federated learning meets mean-field game theory. IEEE Transactions on Communications, 68(11), 6840–6857.
Tan, Y., Liu, J., & Kato, N. (2022). Blockchain-based lightweight authentication for resilient UAV communications: Architecture, scheme, and future directions. IEEE Wireless Communications, 29(3), 24–31.
Wan, S., Lu, J., Fan, P., & Letaief, K. B. (2020). Toward big data processing in IoT: Path planning and resource management of UAV base stations in mobile-edge computing system. IEEE Internet of Things Journal, 7(7), 5995–6009.
Wang, L., Wang, K., Pan, C., Xu, W., Aslam, N., & Nallanathan, A. (2022). Deep reinforcement learning based dynamic trajectory control for UAV-assisted mobile edge computing. IEEE Transactions on Mobile Computing, 21(10), 3536–3550.
Wang, X., et al. (2022). Joint flying relay location and routing optimization for 6G UAV–IoT networks: A graph neural network-based approach. Remote Sensing, 14(17), 4377.
Wang, Y., Fang, W., Ding, Y., & Xiong, N. (2021). Computation offloading optimization for UAV-assisted mobile edge computing: A deep deterministic policy gradient approach. Wireless Networks, 27(4), 2991–3006.
Wang, Y., Su, Z., Zhang, N., & Benslimane, A. (2021). Learning in the air: Secure federated learning for UAV-assisted crowdsensing. IEEE Transactions on Network Science and Engineering, 8(2), 1055–1069.
Wu, Z., Pan, S., Chen, F., Long, G., Zhang, C., & Yu, P. S. (2021). A comprehensive survey on graph neural networks. IEEE Transactions on Neural Networks and Learning Systems, 32(1), 4–24.
Yazid, Y., Ez-Zazi, I., Guerrero-González, A., El Oualkadi, A., & Arioua, M. (2021). UAV-enabled mobile edge-computing for IoT based on AI: A comprehensive review. Drones, 5(4), 148.
You, C., Huang, K., Chae, H., & Kim, B.-H. (2017). Energy-efficient resource allocation for mobile-edge computation offloading. IEEE Transactions on Wireless Communications, 16(3), 1397–1411.
Zhao, N., Ye, Z., Pei, Y., Liang, Y.-C., & Niyato, D. (2022). Multi-agent deep reinforcement learning for task offloading in UAV-assisted mobile edge computing. IEEE Transactions on Wireless Communications, 21(9), 6949–6960.
Zhu, S., Gui, L., Zhao, D., Cheng, N., Zhang, Q., & Lang, X. (2021). Learning-based computation offloading approaches in UAVs-assisted edge computing. IEEE Transactions on Vehicular Technology, 70(1), 928–944.