

Revisar literatura recomendada
13/01/2025
Innovaciones tecnológicas en IoT, UAV e IA para la recopilación de datos
La integración de tecnologías avanzadas como el Internet de las Cosas (IoT), los vehículos aéreos no tripulados (UAV) y la inteligencia artificial (IA) está transformando nuestra capacidad para recopilar y procesar datos en tiempo real. Este cambio no solo mejora la eficiencia y precisión en sectores clave como la agricultura, el monitoreo ambiental y la gestión de desastres, sino que también representa un paso indispensable hacia un futuro más sostenible y conectado. Entender estas tecnologías y sus aplicaciones es esencial para aprovechar al máximo su potencial en la construcción de soluciones innovadoras.
En el contexto actual, la convergencia de tecnologías emergentes como el Internet de las Cosas (IoT, Internet of Things) y los Vehículos Aéreos No Tripulados (UAV, Unmanned Aerial Vehicles) está revolucionando la manera en que se recopilan, procesan y transmiten datos. Los UAV, gracias a su versatilidad y capacidad para operar en entornos diversos, se han consolidado como herramientas esenciales para recolectar información de sensores y proporcionar servicios de red en tiempo real. Esto es especialmente relevante en aplicaciones que demandan altos estándares de puntualidad, precisión y eficiencia en la transmisión de datos. A lo largo de este artículo, se examinan los principales desafíos asociados con estas tareas, se analizan las mediciones de parámetros fundamentales necesarios para su implementación y se presentan soluciones basadas en Inteligencia Artificial (IA, Artificial Intelligence) que abordan dichas problemáticas. Asimismo, se subraya la importancia de algunos estudios científicos que respaldan los avances en este campo, destacando su impacto en el desarrollo tecnológico y en su integración en diversos sectores.
La importancia de los UAV en sistemas IoT para aplicaciones prácticas
Un escenario central en la aplicación de los UAV es la recopilación de datos de sensores y su posterior transmisión a centros de procesamiento. Este paso implica estrictos requerimientos de precisión y exactitud, ya que la calidad del servicio y el rendimiento del sistema dependen de la transmisión de datos en tiempo real (Qin et al., 2023). Para cumplir con estas exigencias, es fundamental planificar de manera óptima tanto las rutas de vuelo como la programación de las transmisiones, considerando factores como la antigüedad de la información, la eficiencia en la recopilación de datos y las limitaciones energéticas de los UAV (You & Zhang, 2020). En este sentido, los algoritmos basados en IA, incluyendo la Inteligencia de Enjambre (SI, Swarm Intelligence) y el Aprendizaje por Refuerzo (RL, Reinforcement Learning), han demostrado ser herramientas eficaces. A diferencia de los métodos de optimización convencionales, estas técnicas son capaces de adaptarse a entornos dinámicos y ofrecer soluciones óptimas en tiempo real, permitiendo una planificación dinámica y eficiente de las rutas de los UAV.
Optimización de rutas y eficiencia energética en UAV
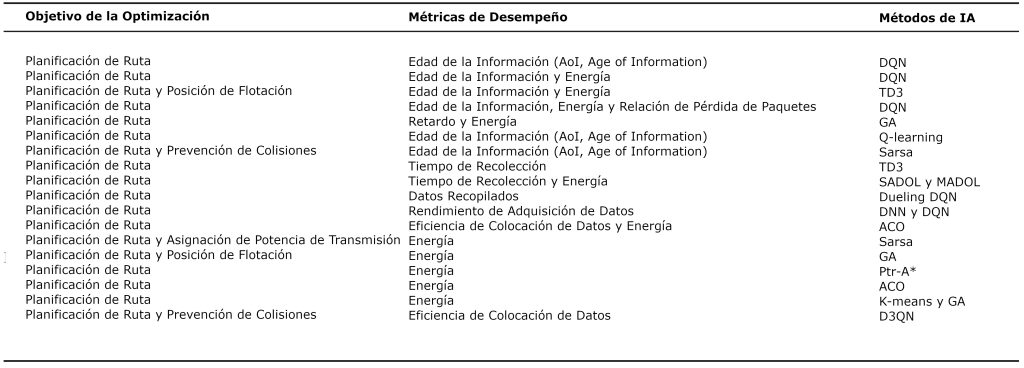
En términos de los procedimientos de mediciones, la recopilación de datos por parte de los UAV puede analizarse desde tres perspectivas fundamentales: la exactitud y precisión en la recolección de información, la eficiencia operativa durante el proceso y el consumo energético de los vehículos. Estos procesos de medición son clave para garantizar un equilibrio entre el rendimiento del sistema y la sostenibilidad de las operaciones. La Tabla III presenta un resumen detallado de los objetivos de optimización, las mediciones de rendimiento y las soluciones basadas en IA que se han propuesto en los trabajos de investigación científica para mejorar las capacidades de recopilación de datos de los UAV. Estos avances no solo han permitido optimizar el uso de recursos, sino que también han ampliado significativamente el rango de aplicaciones prácticas de estas tecnologías en sectores como la agricultura de precisión, la gestión de desastres y la vigilancia ambiental.
De ahí que, el uso combinado de UAV, IoT e IA está revolucionando las formas convencionales de recopilación y procesamiento de datos, permitiendo abordar desafíos complejos en tiempo real y con alta eficiencia. Estas tecnologías no solo mejoran los procesos actuales, sino que también abren nuevas oportunidades para el desarrollo de soluciones más inteligentes y sostenibles en diversas industrias. Su adopción y perfeccionamiento continuo serán necesarias para impulsar la innovación, mejorar el bienestar de los usuarios y garantizar un futuro más conectado y eficiente.
La Edad de la Información: Relevancia en la transmisión de datos
El proceso de medición conocido como Edad de la Información (AoI, Age of Information) ha cobrado creciente relevancia en los sistemas de comunicación modernos debido a su capacidad para medir la actualidad y la precisión de la información transmitida. En el contexto de las redes de sensores (SN, Sensor Networks) y sistemas de Internet de las Cosas (IoT, Internet of Things) asistidos por vehículos aéreos no tripulados (UAV, Unmanned Aerial Vehicles), la optimización del AoI, (Age of Information), se ha convertido en un área clave de investigación. Este interés se debe a que mantener bajos niveles de AoI es esencial para garantizar la eficacia de la adquisición y transmisión de datos, especialmente en aplicaciones críticas como la vigilancia, la teledetección y los servicios en tiempo real. Se ha demostrado que diversas técnicas avanzadas, como los algoritmos de planificación de trayectorias y esquemas de aprendizaje profundo, pueden mejorar de manera significativa la exactitud de los datos transmitidos por sistemas UAV-IoT.
Conviene resaltar, que se ha observado como la suma ponderada de la edad de la información, AoI, disminuye de forma monótona con el incremento del radio de cobertura de las redes de sensores y, al mismo tiempo, aumenta con el número de sensores desplegados (Liu et al., 2022). En escenarios donde los nodos terrestres cuentan con recursos energéticos limitados, los UAV deben tomar decisiones estratégicas entre cargar los nodos terrestres o recolectar datos. Para abordar esta complejidad, se ha desarrollado una planificación conjunta de trayectorias que optimiza simultáneamente la transferencia de energía e información, minimizando la AoI promedio del sistema. Dentro de este enfoque, un esquema basado en aprendizaje profundo con redes neuronales profundas Q (DQN, Deep Q-Network) demostró encontrar soluciones óptimas en simulaciones, superando a otros métodos como los esquemas codiciosos o los basados únicamente en energía, logrando así una menor edad de la información, AoI, promedio y un desempeño energético más eficiente.
Adicionalmente, investigaciones recientes han propuesto la optimización conjunta de variables críticas como la ubicación en vuelo de los UAV, el consumo energético y el ancho de banda disponible, con el objetivo de mejorar la eficiencia y calidad de los sistemas de adquisición de datos. Por ejemplo, un algoritmo de planificación de trayectorias basado en TD3 (TD3-AUTP, Twin Delayed Deep Deterministic Policy Gradient-Aware UAV Trajectory Planning) ha demostrado un rendimiento superior al de otros enfoques, como los algoritmos DQN y actor-crítico (AC), logrando una menor edad de la información, AoI, promedio y mayor eficiencia energética en sistemas UAV-IoT (Sun et al., 2021). Asimismo, otros estudios han destacado la importancia del muestreo de datos y de los procesos de puesta en cola de sensores, en el diseño de trayectorias óptimas para UAVs, lo que influye significativamente en los niveles de la edad de la información, AoI, y del desempeño general del sistema (Tong et al., 2020).
Algoritmos genéticos y planificación de trayectorias óptimas
Para un caso particular, ha sido propuesto un enfoque de reemplazo de paquetes basado en estrategias de muestreo, complementado con un algoritmo de planificación de trayectorias que optimiza simultáneamente la edad de la información, AoI, la velocidad de pérdida de paquetes y el consumo energético de los UAV. Los resultados experimentales mostraron que este esquema supera a los algoritmos codiciosos, logrando menores niveles de pérdidas de paquetes y retrasos en la transmisión (Tong et al., 2020). Además, la información recopilada por los UAV en tareas sensibles a la variación del tiempo, como la vigilancia y la teledetección, subraya la necesidad de una transmisión rápida y precisa. Un retraso más allá de los límites aceptables podría resultar en el fracaso de la misión prevista, lo que destaca la importancia de considerar restricciones prácticas como la energía, el almacenamiento y la comunicación en los algoritmos de planificación de rutas. En este sentido, un enfoque basado en algoritmos genéticos (GA, Genetic Algorithm) ha sido utilizado para diseñar rutas de vuelo eficientes que satisfacen las restricciones del sistema mientras se minimiza el tiempo de ejecución, ofreciendo soluciones casi óptimas con mayor rapidez (Joseph et al., 2020).
De este modo, la incorporación de tecnologías avanzadas como los UAV, combinadas con algoritmos de optimización y aprendizaje profundo, representa un avance significativo en la gestión de la Edad de la Información en sistemas IoT. Estas soluciones no solo mejoran la eficiencia energética y reducen la edad AoI, sino que también garantizan una transmisión de datos más oportuna y fiable. A medida que estas tecnologías evolucionan, su implementación tendrá un impacto positivo en diversas industrias, mejorando el bienestar de los usuarios y habilitando nuevos servicios que dependen de datos actualizados, precisos y exactos para su funcionamiento.
Es evidente, que la recopilación de datos mediante vehículos aéreos no tripulados (UAV, Unmanned Aerial Vehicles) ha emergido como una herramienta clave para diversas aplicaciones, especialmente en el monitoreo ambiental, la gestión de recursos y las redes de sensores inalámbricos (WSN, Wireless Sensor Networks). Bajo estas circunstancias, garantizar la eficiencia en la recopilación de datos implica no solo maximizar la cantidad de datos recolectados, sino también minimizar el tiempo necesario para dicha operación. Dicha eficiencia puede lograrse mediante la optimización de las trayectorias y la programación de las comunicaciones de los UAV, lo que requiere métodos avanzados de planificación y toma de decisiones. Diversos algoritmos de aprendizaje por refuerzo, como Q-learning, SARSA y TD3, han sido propuestos para abordar inconvenientes y limitaciones técnicas relacionados con la latencia en la entrega de datos, la prevención de colisiones y las restricciones energéticas inherentes al uso de UAV en escenarios reales.
Inteligencia artificial y aprendizaje profundo en la optimización de UAV
Ciertamente, ha sido utilizado el aprendizaje por refuerzo Q-learning para planificar las trayectorias de los UAV, de manera que se garantice el cumplimiento de la Edad de la Información AoI (Age of Information) y las fechas límite de entrega de los datos. Esto resulta en una reducción significativa en las pérdidas de paquetes de datos caducados, demostrando un desempeño superior en comparación con algoritmos genéticos (GA, Genetic Algorithms) en términos de eficiencia temporal (Li et al., 2019). Asimismo, se ha abordado el problema de la prevención de colisiones durante la recopilación de datos. Mediante un algoritmo basado en SARSA (State-Action-Reward-State-Action), se logra minimizar la edad AoI promedio de los sensores, teniendo en cuenta tanto las restricciones energéticas de los UAV como los riesgos de colisión. Este enfoque fue capaz de aproximar políticas óptimas bajo ciertas condiciones operativas, destacándose como una solución eficaz para aplicaciones prácticas (Li et al., 2023).
Otros enfoques relevantes se encuentran en la aplicación de un algoritmo de planificación de trayectorias basado en TD3 (Twin Delayed Deep Deterministic Policy Gradient). Este algoritmo no solo minimiza el tiempo de recopilación de datos, sino que también cumple con las restricciones de movimiento y las exigencias de rendimiento, incluso en entornos urbanos tridimensionales con Información del Estado del Canal, CSI, (Channel State Information) imperfecto. Los resultados obtenidos evidenciaron una reducción significativa en el tiempo de adquisición de datos en comparación con métodos basados en la Optimización por Colonias de Hormigas, ACO, (Ant Colony Optimization) (Wang et al., 2022). Estos avances permiten maximizar la eficiencia operativa de los UAV, haciéndolos más adecuados para aplicaciones en contextos desafiantes.
Por otro lado, las redes de sensores inalámbricos (WSN, Wireless Sensor Networks) que utilizan tecnología de comunicación por retro dispersión presentan ventajas significativas en cuanto a monitoreo ambiental en áreas remotas, ya que no requieren mantenimiento o reemplazo de baterías. Sin embargo, el rango de transmisión de esta tecnología es limitado. Para superar este desafío, ha sido propuesto el uso de múltiples UAV para asistir en la recopilación de datos, optimizando simultáneamente el tiempo de vuelo y la carga de trabajo de los UAV. Inicialmente, se utiliza un método de agrupamiento basado en modelos de mezcla gaussiana para dividir las redes de sensores de retro dispersión en grupos, seguido por la implementación de un método jerárquico de aprendizaje por refuerzo profundo (DRL, Deep Reinforcement Learning) basado en opciones. Este enfoque permite optimizar no solo las trayectorias y la carga de los UAV, sino también la eficiencia general de la recopilación de datos (Zhang et al., 2021).
Soluciones avanzadas para la gestión de redes IoT y WSN
Aquí conviene referirnos a los avances en la planificación de trayectorias, optimización energética y algoritmos de aprendizaje por refuerzo, donde se ha demostrado que han sido esenciales para mejorar la eficiencia en la recopilación de datos mediante UAV, incluso en condiciones adversas. Estas tecnologías no solo ofrecen soluciones innovadoras para la gestión de redes de sensores inalámbricos y el monitoreo ambiental, sino que también allanan el camino hacia aplicaciones más robustas y sostenibles en diversos sectores de la industria. Su desarrollo continuo promete un impacto significativo en el bienestar de los usuarios finales y en el progreso de tecnologías emergentes que aprovechan al máximo el potencial de los UAV.
En el campo de la recopilación de datos mediante vehículos aéreos no tripulados (UAV, Unmanned Aerial Vehicles), se han desarrollado diversas técnicas avanzadas que buscan optimizar tanto las trayectorias de vuelo como la eficiencia energética y la transmisión de datos. Estas tecnologías son particularmente relevantes en escenarios donde intervienen dispositivos de Internet de las cosas (IoT, Internet of Things), ya que dichos dispositivos suelen operar con recursos limitados de energía y capacidad de memoria. Los UAV pueden desempeñar un papel clave al facilitar la recolección de datos en áreas remotas o complejas, mejorando así la eficiencia global del sistema. En este contexto, se han propuesto enfoques como el Aprendizaje Profundo de Opciones de Agente Único (SADOL, Single-Agent Deep Option Learning) y el Aprendizaje Profundo de Opciones Multiagente (MADOL, Multi-Agent Deep Option Learning), que han mostrado resultados prometedores en escenarios con límites deterministas y difusos, respectivamente. La efectividad de estos algoritmos ha sido comparada con otros métodos como MADDPG (Multi-Agent Deep Deterministic Policy Gradient), DDPG (Deep Deterministic Policy Gradient) y DQN (Deep Q-Network), demostrando su capacidad para maximizar la recopilación de datos inalámbricos al determinar las rutas de vuelo más eficientes para los UAV, lo cual resulta determinante en términos de ahorro energético y reducción de tiempo de vuelo (Nguyen et al., 2022).
En este escenario, Nguyen et al. (2022) proponen un modelo basado en aprendizaje profundo por refuerzo (DRL, Deep Reinforcement Learning) utilizando un algoritmo DQN para optimizar la trayectoria de vuelo en áreas específicas de cobertura. Este modelo no solo equilibra la recopilación de datos y el tiempo de convergencia, sino que logra un rendimiento comparable al de soluciones óptimas que asumen conocimiento perfecto del entorno. De manera similar, para abordar escenarios dinámicos donde los nodos IoT pueden cambiar debido a adiciones o eliminaciones, Li et al. (2022) plantean un marco de DRL de dos etapas. Este tipo de esquema combina una Red Neuronal Profunda (DNN, Deep Neural Network) para modelar el entorno dinámico en una primera etapa, y un algoritmo DQN (Deep Q-Network) para planificar trayectorias de vuelo en la segunda etapa. Los resultados experimentales evidencian que dicho enfoque mejora significativamente la probabilidad de éxito en la recopilación de datos, adaptándose eficazmente a las variaciones del entorno.
Prevención de colisiones y ahorro energético en UAV
Otra dificultad técnica crítica en la recopilación de datos mediante UAV es la prevención de colisiones en escenarios con múltiples UAV que interactúan en espacios compartidos para recopilar datos de nodos IoT distribuidos. Wang et al. (2022) abordan esta problemática mediante un algoritmo basado en una Red Q de Doble Profundidad de Duelo (D3QN, Double Deep Q Network with Dueling Architecture), que permite a los UAV aprender estrategias de decisión sin necesidad de conocimientos previos del entorno. Esta técnica no solo evita colisiones, sino que también maximiza la cantidad de datos recopilados, demostrando su potencial para operar de manera eficiente en entornos complejos.
Además de la prevención de colisiones, otro aspecto fundamental es la reducción del consumo energético. Liu et al. (2020) proponen un esquema denominado Selección de Puntos de Muestreo Conjunto con UAV Inteligentes (SPS-IUTO, Sampling Points Selection Joint Intelligent Unmanned Aerial Vehicles), basado en la completitud de matrices. Este método selecciona puntos de muestreo estratégicos utilizando matrices y optimiza las trayectorias de los UAV mediante un algoritmo de Optimización por Colonia de Hormigas (ACO, Ant Colony Optimization). La implementación del esquema SPS-IUTO reduce tanto la redundancia de datos transmitidos como el consumo energético, haciendo más eficiente el proceso de recopilación de datos.
En el ámbito de la eficiencia energética de dispositivos IoT, Mondal et al. (2022) plantean el uso del algoritmo SARSA (State-Action-Reward-State-Action) para abordar de manera conjunta los problemas de trayectoria de UAV, asociación de dispositivos y asignación de potencia de transmisión. Este algoritmo logra minimizar el consumo total de energía de los dispositivos IoT durante el proceso de recopilación de datos, asegurando que se respetaran las restricciones de velocidad de transmisión de datos. Comparado con otros enfoques como el Algoritmo de Optimización por Enjambre de Partículas (PSO, Particle Swarm Optimization), SARSA muestra un desempeño superior al reducir el consumo energético total de los dispositivos involucrados.
Así, las tecnologías y enfoques descritos no solo representan avances significativos en el campo de la recopilación de datos mediante UAV, sino que también destacan por su capacidad para resolver problemas complejos como la optimización energética, la planificación de trayectorias y la prevención de colisiones. Estos desarrollos resultan esenciales para el progreso futuro de la industria, ya que ofrecen soluciones innovadoras que incrementan la eficiencia operativa y reducen los costos asociados. Asimismo, contribuyen al bienestar de los usuarios finales al garantizar servicios más confiables, sostenibles y adaptados a las necesidades dinámicas de los entornos tecnológicos modernos.
Analicemos el proceso de recolección de datos en escenarios de comunicaciones masivas máquina a máquina (mMTC, Massive Machine-to-Machine Communications), donde es necesario diseñar estrategias óptimas tanto para la posición de flotación como para la planificación de vuelo de los vehículos aéreos no tripulados (UAV, Unmanned Aerial Vehicles) dentro de los enjambres, con el objetivo de minimizar el consumo energético. En este contexto, Shen et al. (2020) proponen una técnica innovadora basada en un mapa energético artificial (AEM, Artificial Energy Map), que emplea un enfoque de agrupamiento de aprendizaje codicioso (GLC, Greedy Learning Clustering) para determinar la posición óptima de flotación de los UAV. Este enfoque no solo optimiza el agrupamiento de los dispositivos de comunicación máquina a máquina, sino también las trayectorias de vuelo de los UAV, minimizando el consumo de energía tanto en la transmisión como en la flotación. Además, se utilizan algoritmos genéticos (GA, Genetic Algorithms) para identificar las rutas de vuelo con menor demanda energética. En comparación con el método tradicional de K-means, esta técnica reduce en un 11% la distancia de vuelo de los UAV y en un 25% su consumo energético. En conjunto, esta metodología representa una solución prometedora para mejorar la eficiencia energética en la recolección de datos mMTC mediante la optimización de la ubicación y el vuelo de los UAV.
Desafíos y oportunidades en la recopilación de datos masivos con UAV
Hay que reconocer, que las restricciones energéticas de los UAV y de los nodos de sensores (SNs, Sensor Nodes) plantean una barrera adicional, ya que la comunicación frecuente entre los UAVs y los sensores SNs puede agotar rápidamente la energía de estos últimos. Por ello, se hace necesario estudiar la conservación de energía en las redes de sensores inalámbricos asistidas por UAVs (WSNs, Wireless Sensor Networks). En este contexto, Zhu et al. (2021) plantean el uso de UAV para acceder a los jefes del enjambre en un orden específico, con el fin de optimizar el proceso de recolección de datos de sensores inalámbricos WSNs agrupados. Para ello, se utiliza un algoritmo basado en redes puntero-A* (Ptr-A, Pointer-A), que planifica las rutas de los UAV, reduciendo el consumo de energía durante la recolección de datos. El algoritmo Ptr-A* se basa en técnicas de aprendizaje profundo por refuerzo (DRL, Deep Reinforcement Learning) y emplea un mecanismo de atención para seleccionar elementos de la secuencia de entrada como salidas, lo que lo convierte en una técnica avanzada para la planificación de rutas. Este enfoque no solo acelera el entrenamiento de enjambres a pequeña escala, sino que también puede aplicarse a problemas de mayor escala.
En el ámbito del monitoreo agrícola, se requiere una gran cantidad de información de los SNs (Sensor Nodes). Para abordar este desafío, Lin et al. (2021) desarrollan un esquema jerárquico de recolección de datos, integrando métodos exactos y voraces para la recopilación de datos de sensores agrícolas asistidos por UAV. Este esquema divide los nodos en diferentes capas, permitiendo una combinación inteligente de ambos métodos. Las rutas de los UAV se planifican utilizando el algoritmo de optimización por colonia de hormigas (ACO, Ant Colony Optimization), que simula el comportamiento de las hormigas en la búsqueda de alimento, encontrando soluciones cercanas a la óptima mediante el intercambio de información y la liberación de feromonas. Este algoritmo tiene un rendimiento superior en la planificación de rutas en comparación con el algoritmo de enfriamiento simulado, permitiendo una planificación más eficiente con menores costos energéticos. Los resultados de las simulaciones demuestran que el método propuesto mejora la eficiencia en la recopilación de datos y en la planificación de rutas para los UAVs.
Asimismo, Alfattani et al. (2019) también abordan el problema de la recolección de datos de sensores inalámbricos WSNs a gran escala, pero con la implementación de múltiples UAV. Los sensores se agrupan en clústeres y subclústeres mediante K-means, y luego se planifican las trayectorias y el número de UAV a utilizar con el algoritmo genético (GA, Genetic Algorithm). Este esquema optimiza los números y trayectorias de UAV, demostrando cómo la agrupación de los nodos SNs, la selección de jefes de enjambre, y las trayectorias y altitudes de los UAVs impactan en los tiempos de recolección de datos. El resultado es una mejora significativa en la eficiencia de la recolección de datos y una reducción en los tiempos de operación.
Un futuro conectado: Impacto de las tecnologías emergentes en la recopilación de dato
Es evidente, que estas tecnologías representan un avance fundamental para la optimización del consumo de energía en los sistemas de recolección de datos mediante UAV en diversos campos como las comunicaciones máquina a máquina, la agricultura y las redes de sensores inalámbricos. Su capacidad para mejorar la eficiencia energética y la velocidad de procesamiento no solo tiene un impacto significativo en la sostenibilidad de las operaciones de recolección de datos, sino que también impulsa la industria hacia un futuro más eficiente, con la mejora continua de los servicios ofrecidos a los usuarios. La implementación de estas tecnologías no solo representa un avance, sino también una oportunidad para mejorar la calidad de vida y optimizar los recursos en sectores clave de la economía global.
En definitiva, la convergencia de tecnologías como los UAV, IoT e IA está sentando las bases para un futuro más eficiente, conectado y sostenible. Estas herramientas no solo abordan barreras técnicas complejas, sino que también impulsan la innovación y generan oportunidades transformadoras en una amplia variedad de sectores. Profundizar en estas áreas de investigación no es solo una prioridad técnica, sino una necesidad estratégica, ya que su desarrollo continuo promete revolucionar la forma en que gestionamos nuestros recursos, mejoramos la calidad de vida y enfrentamos los retos globales del mañana. El verdadero potencial de estas tecnologías aún está por descubrir, y su impacto podría redefinir lo que entendemos por progreso en las sociedades del futuro.
El Futuro de la Innovación Tecnológica: Inteligencia Artificial, UAVs e IoT en la Era de la Convergencia
En conclusión, este artículo ha sido enriquecido con el análisis de un destacado estudio académico titulado «AI for UAV-Assisted IoT Applications: A Comprehensive Review», publicado en el prestigioso IEEE Internet of Things Journal. Esta investigación, llevada a cabo por un equipo de expertos reconocidos —Nan Cheng, Shen Wu, Xiucheng Wang, Zhisheng Yin, Changle Li, Wen Chen y Fangjiong Chen—, ofrece una revisión exhaustiva del papel clave que desempeña la inteligencia artificial en las aplicaciones del Internet de las Cosas (IoT) potenciadas por vehículos aéreos no tripulados (UAV).
El estudio, disponible bajo la licencia Creative Commons Attribution 4.0, permite su uso, distribución y adaptación libre, siempre que se otorgue el reconocimiento correspondiente a los autores. Si desea obtener más información sobre esta licencia, puede visitar el sitio oficial: Creative Commons Attribution 4.0.
La profundidad del análisis y el rigor científico que respaldan esta investigación la convierten en una referencia indispensable para comprender cómo la convergencia de la inteligencia artificial, los UAV y el IoT está redefiniendo los límites de la innovación tecnológica. Más allá de señalar los desafíos y oportunidades de esta intersección, el estudio destaca nuevas perspectivas y áreas de investigación que prometen moldear el futuro de la tecnología.
En un mundo donde la integración de estas tecnologías está revolucionando industrias y transformando nuestra interacción con el entorno, investigaciones como esta son fundamentales. No solo proporcionan un marco analítico para anticipar los impactos de estas transformaciones en la sociedad y la economía global, sino que también inspiran un futuro en el que la tecnología y la creatividad humana avanzan juntas hacia horizontes sin precedentes.
Referencias Bibliográficas Recomendadas
Alfattani, S., Jaafar, W., Yanikomeroglu, H., & Yongacoglu, A. (2019). Multi-UAV data collection framework for wireless sensor networks. IEEE Global Communications Conference, 1-6.
Joseph, J., Radmanesh, M., Sadat, M. N., Dai, R., & Kumar, M. (2020). UAV path planning for data ferrying with communication constraints. In Proceedings of IEEE Annual Consumer Communications and Networking Conference (pp. 1–9).
Li, S., Wu, F., Luo, S., Fan, Z., Chen, J., & Fu, S. (2022). Dynamic online trajectory planning for a UAV-enabled data collection system. IEEE Transactions on Vehicular Technology, 71(12), 13332–13343.
Li, W., Wang, L., & Fei, A. (2019). Minimizing packet expiration loss with path planning in UAV-assisted data sensing. IEEE Wireless Communications Letters, 8(6), 1520–1523.
Li, Z., Tong, P., Liu, J., Wang, X., Xie, L., & Dai, H. (2023). Learning-based data gathering for information freshness in UAV-assisted IoT networks. IEEE Internet of Things Journal, 10(3), 2557–2573.
Lin, C., Han, G., Qi, X., Du, J., Xu, T., & Martinez-Garcia, M. (2021). Energy-optimal data collection for unmanned aerial vehicle-aided industrial wireless sensor network-based agricultural monitoring system: A clustering compressed sampling approach. IEEE Transactions on Industrial Informatics, 17(6), 4411–4420.
Liu, L., Xiong, K., Cao, J., Lu, Y., Fan, P., & Letaief, K. B. (2022). Average AoI minimization in UAV-assisted data collection with RF wireless power transfer: A deep reinforcement learning scheme. IEEE Internet of Things Journal, 9(7), 5216–5228.
Liu, X., Song, H., & Liu, A. (2020). Intelligent UAVs trajectory optimization from space-time for data collection in social networks. IEEE Transactions on Network Science and Engineering, 8(2), 853–864.
Mondal, A., Mishra, D., Prasad, G., & Hossain, A. (2022). Joint Optimization framework for minimization of device energy consumption in transmission rate constrained UAV-assisted IoT network. IEEE Internet of Things Journal, 9(12), 9591–9607.
Nguyen, K. K., Duong, T. Q., Do-Duy, T., Claussen, H., & Hanzo, L. (2022). 3D UAV trajectory and data collection optimisation via deep reinforcement learning. IEEE Transactions on Communications, 70(4), 2358–2371.
Qin, X., Li, Y., Song, X., Ma, N., Huang, C., & Zhang, P. (2023). Timeliness of information for computation-intensive status updates in task-oriented communications. IEEE Journal on Selected Areas in Communications, 41(3), 623–638.
Shen, L., Wang, N., Zhu, Z., Fan, Y., Ji, X., & Mu, X. (2020). UAV-enabled data collection for MMTC networks: AEM modeling and energy-efficient trajectory design. IEEE International Conference on Communications, 1-6.
Sun, M., Xu, X., Qin, X., & Zhang, P. (2021). AoI-energy-aware UAV-assisted data collection for IoT networks: A deep reinforcement learning method. IEEE Internet of Things Journal, 8(24), 17275–17289.
Tong, P., Liu, J., Wang, X., Bai, B., & Dai, H. (2020). Deep reinforcement learning for efficient data collection in UAV-aided Internet of Things. In Proceedings of IEEE International Conference on Communications Workshops (pp. 716–721).
Wang, X., Gursoy, M. C., Erpek, T., & Sagduyu, Y. E. (2022). Learning-based UAV path planning for data collection with integrated collision avoidance. IEEE Internet of Things Journal, 9(17), 16663–16676.
Wang, Y., Fang, W., Ding, Y., & N. Xiong. (2022). Trajectory design for UAV-based Internet of Things data collection: A deep reinforcement learning approach. IEEE Internet of Things Journal, 9(5), 3899–3912.
You, C., & Zhang, R. (2020). Hybrid offline-online design for UAV-enabled data harvesting in probabilistic LoS channels. IEEE Transactions on Wireless Communications, 19(6), 3753–3768.
Zhang, Y., Mou, Z., Gao, F., Xing, L., Jiang, J., & Han, Z. (2021). Hierarchical deep reinforcement learning for backscattering data collection with multiple UAVs. IEEE Internet of Things Journal, 8(5), 3786–3800.
Zhu, B., Bedeer, E., Nguyen, H. H., Barton, R., & Henry, J. (2021). UAV trajectory planning in wireless sensor networks for energy consumption minimization by deep reinforcement learning. IEEE Transactions on Vehicular Technology, 70(9), 9540–9554.