

Revisar literatura recomendada
13/01/2025
Innovaciones y Desafíos en el Uso de UAV en un Entorno IoT
Los Vehículos Aéreos No Tripulados (UAV) han revolucionado múltiples sectores industriales gracias a su integración con tecnologías como la inteligencia artificial, el aprendizaje profundo y las redes IoT. Su capacidad para recolectar datos, optimizar recursos y mejorar la seguridad ha permitido aplicaciones innovadoras en agricultura, logística, monitoreo ambiental y vigilancia. Estas tecnologías representan un avance indispensable hacia un futuro más conectado, eficiente y sostenible para la humanidad.
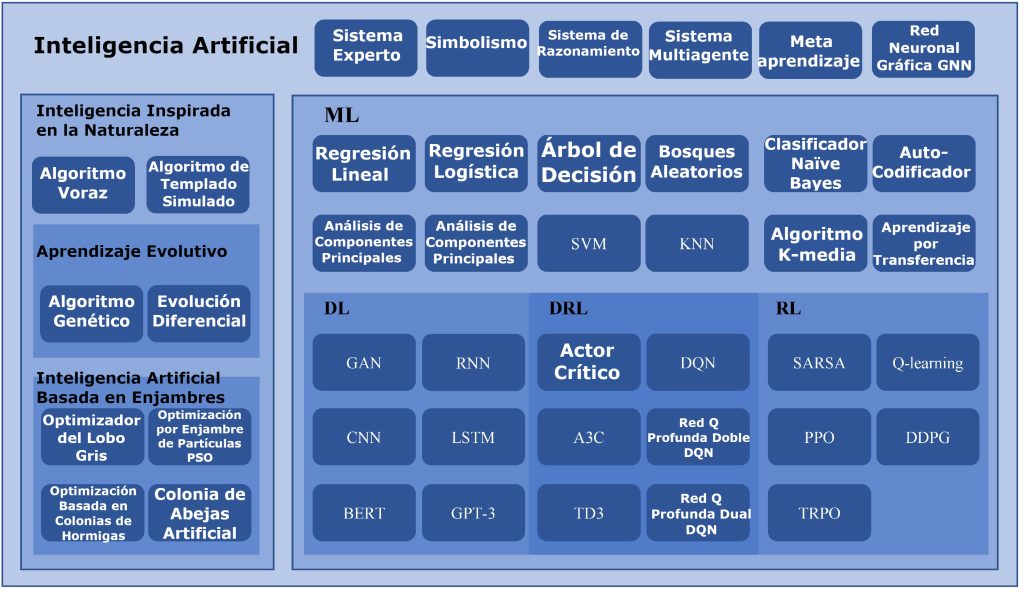
Al respecto conviene decir, que los vehículos aéreos no tripulados (UAV, Unmanned Aerial Vehicles) han experimentado una creciente adopción en diversas aplicaciones tecnológicas, especialmente en el contexto del Internet de las Cosas (IoT, Internet of Things). Su capacidad para proporcionar soluciones rápidas y eficientes en la recolección de datos, la vigilancia y la prestación de servicios ha transformado sectores como la agricultura, la logística y la atención médica. Sin embargo, esta integración masiva no está exenta de problemas técnicos. Entre estos, destacan la limitada capacidad energética de los UAV, las complejidades derivadas de la heterogeneidad y la proliferación de dispositivos IoT, y la creciente demanda de servicios de comunicación. Estos obstáculos imponen la necesidad de mejorar las capacidades de comunicación de los UAV, implementar estrategias avanzadas de gestión de redes, y desarrollar sistemas de automatización e inteligencia artificial que permitan gestionar de manera eficiente los servicios de comunicación entre máquinas a gran escala. En la Figura 1 se muestran algunos Algoritmos de Inteligencia Artificial y su clasificación.
Prevención de Colisiones: Clave para la Seguridad de los UAV
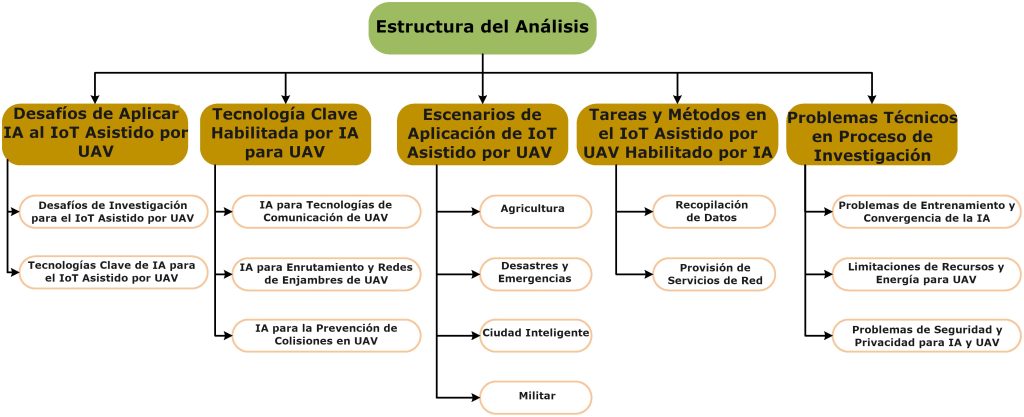
Por otro lado, uno de los problemas más críticos en la operación de UAV es la prevención de colisiones, dado que estos vehículos operan en entornos altamente dinámicos y con condiciones de vuelo inciertas. Durante sus misiones, los UAV enfrentan riesgos de colisión con diversas entidades físicas, lo que compromete tanto su desempeño como la seguridad del entorno. En este contexto, la prevención de colisiones involucra principalmente dos pasos: la detección de obstáculos mediante sensores, y el uso de la información recopilada para ejecutar maniobras de evasión. Además, enjambres de UAV deben coordinarse para evitar colisiones internas a través de la planificación conjunta de trayectorias. Así, la percepción eficiente del entorno, el diseño de algoritmos para evitar obstáculos y la planificación grupal de trayectorias se vuelven aspectos fundamentales. En la Figura 2 se presenta un esquema general de implementación de algunas líneas de investigación.
Importancia de la Selección de Sensores para UAV
La selección adecuada de sensores es clave para mejorar la percepción del entorno. Sensores como cámaras, sistemas infrarrojos, radar, LIDAR (Light Detection and Ranging, Detección y Rango Óptica) y sonar son herramientas esenciales para la detección de obstáculos. Según estudios como el presentado por Zuo et al. (2021), la selección de sensores debe depender de la complejidad de la escena y la capacidad de procesamiento de los UAV, ya que un uso excesivo de sensores puede generar una sobrecarga computacional innecesaria. Las estrategias de prevención pasiva de colisiones, que dependen de una detección precisa y oportuna de obstáculos dinámicos, presentan mayores desafíos en comparación con las estrategias de prevención activa, donde la planificación avanzada de trayectorias reduce la complejidad algorítmica. Como un ejemplo la Figura 3 describe algunas áreas de aplicación de sensores de IA en la tecnología de comunicación inalámbrica.

Métodos Avanzados para la Planificación de Trayectorias en UAV
Para abordar estos problemas, algunos estudios han propuesto múltiples métodos de planificación de trayectorias libres de colisiones. Por ejemplo, Lin y Saripalli (2017) presentaron un método de baja complejidad temporal basado en muestreo, que identifica posibles colisiones y genera rutas óptimas utilizando un sistema de simulación en circuito cerrado. Este método permite agregar trayectorias libres de colisiones a las rutas posibles y seleccionar la más corta como la mejor opción. Asimismo, Augugliaro, Schoellig y D’Andrea (2012) introdujeron un enfoque para la planificación de trayectorias en espacios tridimensionales para múltiples UAV, empleando optimización iterativa para resolver problemas de colisión. Aunque efectivo en entornos más simples, este método mostró limitaciones en su eficiencia al aplicarse a enjambres grandes de UAV. La Figura 4 proporciona una comparación visual de estos métodos y su efectividad en diferentes escenarios.
El Impacto del IoT y la Optimización en los UAV
Entre tanto, el desarrollo y perfeccionamiento de tecnologías relacionadas con los UAV es esencial para garantizar su integración segura y eficiente en un entorno IoT cada vez más conectado. Soluciones como las mencionadas no solo permiten superar los desafíos actuales, sino que también abren la puerta a nuevas aplicaciones y oportunidades en sectores clave de la industria. La mejora de las capacidades de los UAV tendrá un impacto directo en el bienestar de los usuarios finales, quienes se beneficiarán de servicios más rápidos, seguros y personalizados. La incorporación de estas innovaciones también contribuirá al avance de tecnologías futuras, promoviendo un entorno donde los UAV puedan desempeñar un papel importante en la transformación digital de la sociedad.
Cabe señalar, que la creciente utilización de vehículos aéreos no tripulados (UAV, Unmanned Aerial Vehicles) ha transformado múltiples sectores, desde la logística y la agricultura hasta la vigilancia y las telecomunicaciones. Su integración en redes de comunicación y su uso en entornos dinámicos ha llevado al desarrollo de tecnologías avanzadas que optimizan tanto su funcionamiento como su seguridad. Sin embargo, las limitaciones en el control eficiente, el manejo de la energía, y los desafíos de seguridad y privacidad continúan siendo áreas críticas que requieren soluciones innovadoras. En este contexto, la inteligencia artificial (IA, Artificial Intelligence) ha surgido como una herramienta clave para mejorar la capacidad de los enjambres de UAV de operar en entornos complejos y satisfacer las demandas cambiantes de los usuarios.
Manejo Energético y Eficiencia en Enjambres de UAV
En relación con las redes de UAV y el control de energía, un manejo eficiente es esencial para garantizar un servicio de calidad y mejorar el desempeño general de los enjambres. Un control deficiente puede reducir la cobertura de la red, la velocidad de comunicación y la duración del servicio, llegando incluso a causar interrupciones. Como solución, algunos estudios han explorado el uso de algoritmos de optimización para mejorar la eficiencia energética. Por ejemplo, Zeng y Zhang (2017) propusieron un algoritmo basado en el espacio de estados lineales que emplea técnicas de optimización convexa secuencial para maximizar la eficiencia energética optimizando la trayectoria de vuelo de los UAV. Por su parte, Wu, Zeng y Zhang (2018) diseñaron un enfoque para maximizar el rendimiento mínimo de los usuarios terrestres en comunicaciones de enlace descendente, optimizando la programación multiusuario, la asociación y la trayectoria de los UAV, así como la potencia de transmisión. Sin embargo, estos métodos suelen ser aplicables únicamente a escenarios estáticos y no se adaptan a los entornos dinámicos que los UAV enfrentan durante el vuelo. Por ello, desarrollar sistemas más robustos y esquemas de control adaptativos acarrea problemas para lograr una operación eficiente de enjambres de UAV en condiciones cambiantes.
Seguridad y Privacidad en las Redes UAV
En cuanto a la seguridad y privacidad de los UAV, estos factores son críticos debido a que los dispositivos operan en el aire y se controlan mediante comunicaciones inalámbricas. Los UAV enfrentan riesgos de pérdida de control y robo de datos a través de ataques a los protocolos de comunicación. Además, los sensores GPS, que son comunes en estos dispositivos, también pueden ser vulnerables a ataques. Para mitigar estos riesgos, se han propuesto tecnologías como la localización visual simultánea y el mapeo (SLAM, Simultaneous Localization and Mapping), así como la odometría visual (VO, Visual Odometry) como alternativas al GPS. Asimismo, la tecnología blockchain, al almacenar datos en una cadena de bloques pública, garantiza un nivel adicional de seguridad y privacidad para las redes de UAV, como se sugiere en el estudio de Ch et al. (2020). Sin embargo, la naturaleza dinámica de los entornos reales sigue siendo una barrera para los algoritmos convencionales, que no pueden adaptarse con rapidez a las condiciones cambiantes ni satisfacer las diversas demandas de los servicios de IoT (Internet de las Cosas).
Inteligencia Artificial: Optimización y Control en Redes UAV
La inteligencia artificial se perfila como una solución prometedora para superar las limitaciones mencionadas. Su capacidad para extraer dinámicas y características del entorno en tiempo real permite optimizar redes de UAV de manera eficiente, respondiendo a las condiciones cambiantes con rapidez y precisión. En comparación con los algoritmos convencionales, los algoritmos basados en IA son más adecuados para tomar decisiones complejas en escenarios dinámicos, lo que incrementa el rendimiento general de los enjambres de UAV y amplía sus posibilidades de aplicación.
De esta manera, las tecnologías de inteligencia artificial y optimización son fundamentales para enfrentar los desafíos asociados a la operación de UAV en redes dinámicas. Su desarrollo no solo garantiza una mayor eficiencia energética y una mejor seguridad, sino que también promueve la innovación en servicios IoT. Estas herramientas avanzadas tienen el potencial de transformar la manera en que los UAV operan en diversos sectores, asegurando un futuro más eficiente, seguro y adaptado a las necesidades de la industria y de los usuarios.
Aprendizaje Profundo para la Operación Autónoma de UAV
Las redes neuronales profundas están transformando diversos sectores tecnológicos gracias a su capacidad para imitar los procesos de pensamiento de la mente humana y aprender estructuras complejas a partir de los datos. En el caso de los Vehículos Aéreos No Tripulados (UAV, Unmanned Aerial Vehicles), estas tecnologías permiten avances significativos en tareas como la prevención de colisiones, la detección de objetivos y la optimización de redes de comunicación. A través del Aprendizaje Profundo (DL, Deep Learning), las Redes Neuronales (NN, Neural Networks) multicapa procesan grandes cantidades de datos y actualizan sus parámetros internos mediante algoritmos de retropropagación, logrando mejorar continuamente su rendimiento. Los UAV, equipados con estas capacidades, pueden asumir roles fundamentales en áreas como la agricultura de precisión, la seguridad, el transporte y el monitoreo ambiental.
En particular, las Redes Neuronales Convolucionales (CNN, Convolutional Neural Networks), especializadas en el procesamiento de imágenes, videos y audio, destacan por su capacidad de análisis en contextos visuales. Por ejemplo, Osco et al. (2021) utilizaron CNN para analizar imágenes capturadas por UAV y realizar el conteo y geolocalización precisa de cultivos de diferentes tipos, alcanzando resultados de vanguardia. De forma similar, Wang et al. (2020) emplearon modelos CNN para detectar obstáculos durante los vuelos de UAV, diseñando rutas óptimas para la prevención de colisiones basadas en los resultados de la detección. Estas aplicaciones permiten no solo mejorar la seguridad de los UAV, sino también su capacidad para operar en entornos complejos y dinámicos.
Adicionalmente, el Aprendizaje Profundo ha sido implementado en la optimización de redes de comunicación y la detección de anomalías en UAV. Por ejemplo, Liu et al. (2021) desarrollaron un método de predicción recursiva basado en Redes Neuronales de Memoria a Corto y Largo Plazo (LSTM, Long Short-Term Memory), logrando predecir con precisión la posición de los UAV y el ángulo entre estos y la estación base. Lo que permitió optimizar la velocidad de comunicación entre los UAV y las estaciones bases para intervalos de tiempo futuros. Asimismo, Munaye et al. (2019) emplearon perceptrones multicapa y modelos LSTM para mejorar la precisión en la localización de los UAV, maximizando tanto el rendimiento del sistema como la experiencia del usuario.
Sin duda se puede afirmar, que estas tecnologías son esenciales para el avance de la industria y la mejora de los servicios que dependen de los UAV. Gracias a la implementación de redes neuronales profundas, los UAV pueden operar con mayor autonomía, precisión y eficiencia, beneficiando a sectores como la agricultura, la logística, la seguridad y el monitoreo ambiental. Estos avances no solo permiten optimizar procesos y reducir costos, sino que también abren nuevas posibilidades de innovación tecnológica que impactarán positivamente en el bienestar de los usuarios y en el desarrollo sostenible de la sociedad.
Aprendizaje por Refuerzo: Soluciones para la Autonomía de UAV
El aprendizaje por refuerzo es una rama del aprendizaje automático que ha demostrado ser altamente efectiva en la toma de decisiones autónomas en tiempo real. Este enfoque permite a los agentes aprender, mediante ensayo y error y exploración continua, las acciones óptimas que deben realizar dentro de un entorno dinámico. En particular, su aplicación en Vehículos Aéreos No Tripulados (UAV, Unmanned Aerial Vehicles) ha cobrado relevancia debido a su capacidad para abordar dificultades técnicas complejas como la planificación de rutas, la navegación autónoma y la optimización de recursos en redes de comunicaciones. Los algoritmos de aprendizaje por refuerzo, como el Aprendizaje Q (Q-learning) y el Aprendizaje por Aproximación de Estado-Acción (SARSA, State-Action-Reward-State-Action), se han utilizado ampliamente para resolver problemas relacionados con la detección de anomalías y la mejora del desempeño en operaciones críticas.
En trabajos de investigación recientes, se han explorado diversos enfoques basados en aprendizaje por refuerzo y aprendizaje profundo por refuerzo (DRL, Deep Reinforcement Learning) para mejorar las capacidades de los UAV en tareas específicas. Por ejemplo, Chen, González-Prelcic y Heath (2020) utilizaron Detección de Objetos (OD, Object Detection) combinada con aprendizaje profundo por refuerzo para habilitar la navegación autónoma sin colisiones en UAV equipados con sensores simples. En este caso, la detección de objetos permite proporcionar observaciones precisas del entorno, que son utilizadas por la Red Neuronal Profunda de Q (DQN, Deep Q-Network) para tomar decisiones óptimas en tiempo real sobre el vuelo. Por otro lado, Lu et al. (2018) aplicaron aprendizaje por refuerzo para detectar anomalías en motores de UAV, lo que contribuye a prevenir fallas críticas y a garantizar la continuidad operativa de estos vehículos.
A su vez, Xiao et al. (2018) investigaron la aplicación del aprendizaje por refuerzo para optimizar la transmisión de datos en UAV, abarcando aspectos como la selección de fragmentos de datos, la potencia de transmisión, los canales de comunicación y los nodos de borde a los que conectarse. Esta investigación logró mejorar métricas clave como la Velocidad de Error de Bits (BER, Bit Error Rate) y la capacidad de resistencia a interferencias, al tiempo que se garantiza la privacidad del usuario y la seguridad del sistema. Los resultados de simulación demuestran la eficacia de las soluciones de seguridad basadas en aprendizaje por refuerzo para proteger sistemas de Computación en el Borde Móvil (MEC, Mobile Edge Computing) contra ataques inteligentes, manteniendo una baja sobrecarga en el sistema.
De manera similar, Liu et al. (2018) propusieron un modelo de control basado en aprendizaje profundo por refuerzo que aborda conjuntamente la cobertura de comunicación, la equidad, el consumo de energía y la conectividad en redes de enjambres de UAV. Este tipo de modelo tiene como objetivo maximizar la cobertura de comunicación y minimizar el consumo energético, aspectos clave para garantizar la sostenibilidad de las operaciones en redes de UAV. Por su parte, Hwang et al. (2022) presentaron un algoritmo distribuido basado en aprendizaje profundo por refuerzo multiagente para resolver el problema de optimización conjunta de la descarga de tareas, la asignación de recursos y la maniobra de múltiples UAV en un entorno colaborativo. Este estudio destaca la viabilidad del aprendizaje profundo por refuerzo descentralizado para diseñar redes de Internet de las Cosas (IoT, Internet of Things) autoorganizadas, donde los UAV desempeñan un papel central en la interconexión y coordinación de dispositivos.
Realmente, el uso de aprendizaje por refuerzo y aprendizaje profundo por refuerzo en UAV representa un avance significativo para el desarrollo de tecnologías autónomas en diversos campos de uso. Estas soluciones no solo mejoran la eficiencia operativa y la seguridad de los UAV, sino que también sientan las bases para futuras aplicaciones innovadoras en la industria, promoviendo el bienestar de los usuarios y fomentando el progreso en sectores clave como el transporte, la vigilancia, las telecomunicaciones y la logística.
Aprendizaje Federado: Seguridad y Privacidad en UAV
El Aprendizaje Federado (FL, Federated Learning) es una tecnología emergente en el ámbito de la inteligencia artificial y el aprendizaje automático que permite entrenar modelos de manera descentralizada. Esta tecnología resulta particularmente útil en aplicaciones donde la privacidad, la seguridad de los datos y la eficiencia en el uso de recursos son factores clave, como en las redes de Vehículos Aéreos No Tripulados (UAV, Unmanned Aerial Vehicles). En este contexto, el Aprendizaje Federado protege los datos originales al compartir únicamente los modelos de entrenamiento, lo que reduce la complejidad del proceso y minimiza la necesidad de recursos computacionales avanzados en los UAV. Además, esta metodología supera limitaciones como el desequilibrio de datos entre dispositivos y permite la formación de modelos incluso en ausencia de datos locales, ampliando significativamente su aplicabilidad en redes con recursos limitados, como las FANET (Flying Ad Hoc Networks, Redes Ad Hoc Voladoras).
En este contexto, Zhang y Hanzo (2020) emplearon el Aprendizaje Federado para mejorar la capacidad de clasificación de imágenes de UAV, logrando reducir los costos de comunicación entre UAV y centros de datos, mientras se obtenía una mayor precisión de clasificación. Este resultado fue posible sin depender de una perfecta información de estado de canal (CSI, Channel State Information), lo que simplifica el proceso y optimiza el rendimiento. En otra aplicación destacada, Fadlullah y Kato (2022) presentan un algoritmo de ubicación de caché de contenido basado en Aprendizaje Federado, que utiliza un método asincrónico de actualización de pesos para evitar redundancias en la migración de aprendizaje. Este algoritmo mejora la privacidad de los usuarios al no requerir el intercambio explícito de informes de preferencias de contenido.
Adicionalmente, para proteger las FANET frente a ataques de interferencia, Mowla, Tran, Doh y Chae (2020) propusieron una estrategia que combina Aprendizaje Federado y Aprendizaje por Refuerzo (RL, Reinforcement Learning). Esta estrategia no solo soluciona el problema del desequilibrio de datos entre nodos, sino que los experimentos demuestran que la arquitectura híbrida supera a enfoques distribuidos convencionales, especialmente en contextos donde no existe un modelo predefinido. Estos avances reflejan el potencial de combinar metodologías innovadoras como el Aprendizaje Federado y el Aprendizaje por Refuerzo para abordar problemas complejos en entornos distribuidos y de recursos limitados.
Sin embargo, la integración de inteligencia artificial en sistemas de IoT (Internet de las Cosas, Internet of Things) asistidos por UAV plantea varios retos. Por un lado, la limitada capacidad computacional y energética de los UAV restringe significativamente la implementación de algoritmos de inteligencia artificial complejos. Por otro lado, la confiabilidad de estos algoritmos puede verse afectada en condiciones extremas, comprometiendo aspectos como la seguridad, la privacidad y la robustez, lo que dificulta su adopción en aplicaciones del mundo real.
El Futuro de los UAV en Redes IoT y FANET
Sin lugar a dudas, la adopción de tecnologías como el Aprendizaje Federado y su integración con otras metodologías avanzadas representa un camino prometedor hacia el desarrollo de sistemas más seguros, eficientes y adaptables. Estas tecnologías no solo mejoran el rendimiento de los UAV y de las redes FANET, sino que también fortalecen la privacidad y la seguridad de los usuarios, allanando el camino para aplicaciones futuras en múltiples industrias. La capacidad de resolver dificultades clave en privacidad, eficiencia y confiabilidad impulsa el avance tecnológico y asegura el bienestar de los usuarios y la sostenibilidad de los sistemas modernos en una amplia gama de sectores.
Por lo tanto, los avances en inteligencia artificial, aprendizaje por refuerzo y tecnologías como el Aprendizaje Federado están transformando las capacidades de los UAV y sus redes. Estos desarrollos no solo resuelven problemas técnicos actuales, sino que también abren la puerta a innovaciones futuras con un impacto positivo en sectores clave. Por esta razón, es imprescindible profundizar en estas áreas tecnológicas por su importancia para el progreso de las sociedades modernas.
Inteligencia Artificial y UAVs en Aplicaciones IoT: Perspectivas Clave de un Estudio Pionero
En conclusión, este artículo ha sido enriquecido por el análisis y las perspectivas extraídas del estudio académico titulado «AI for UAV-Assisted IoT Applications: A Comprehensive Review», publicado en el reconocido IEEE Internet of Things Journal. Este trabajo, realizado por un equipo de destacados investigadores —Nan Cheng, Shen Wu, Xiucheng Wang, Zhisheng Yin, Changle Li, Wen Chen y Fangjiong Chen—, ofrece un análisis exhaustivo sobre el uso de la inteligencia artificial en aplicaciones del Internet de las Cosas (IoT) asistidas por vehículos aéreos no tripulados (UAV).
Cabe destacar que este artículo está disponible bajo una licencia Creative Commons Attribution 4.0, que permite su uso y distribución siempre que se reconozca debidamente la autoría original. Puede consultar más información sobre esta licencia en el siguiente enlace: https://creativecommons.org/licenses/by/4.0/.
La profundidad del análisis y el rigor académico de los autores reflejan la relevancia de esta contribución científica, la cual constituye un recurso invaluable para comprender los avances tecnológicos en la intersección entre la inteligencia artificial, los UAVs y las aplicaciones IoT.
Referencias Bibliográficas Recomendadas
Augugliaro, F., Schoellig, A. P., & D’Andrea, R. (2012). Generation of collision-free trajectories for a quadrocopter fleet: A sequential convex programming approach. In Proceedings of IEEE International Conference on Intelligent Robots and Systems (pp. 1917–1922).
Ch, R., Srivastava, G., Gadekallu, T. R., Maddikunta, P. K. R., & Bhattacharya, S. (2020). Security and privacy of UAV data using blockchain technology. Journal of Information Security and Applications, 55, 102670.
Chen, Y., González-Prelcic, N., & Heath, R. W. (2020). Collision-free UAV navigation with a monocular camera using deep reinforcement learning. En Proceedings of the IEEE International Workshop on Machine Learning for Signal Processing (pp. 1–6).
Fadlullah, Z. M., & Kato, N. (2022). HCP: Heterogeneous computing platform for federated learning based collaborative content caching towards 6G networks. IEEE Transactions on Emerging Topics in Computing, 10(1), 112–123.
Hwang, S., Lee, H., Park, J., & Lee, I. (2022). Decentralized computation offloading with cooperative UAVs: Multi-agent deep reinforcement learning perspective. IEEE Wireless Communications, 29(4), 24–31.
Lin, Y., & Saripalli, S. (2017). Sampling-based path planning for UAV collision avoidance. IEEE Transactions on Intelligent Transportation Systems, 18(11), 3179–3192.
Liu, C., Yuan, W., Wei, Z., Liu, X., & Ng, D. W. K. (2021). Location-aware predictive beamforming for UAV communications: A deep learning approach. IEEE Wireless Communications Letters, 10(3), 668-672.
Liu, C. H., Chen, Z., Tang, J., Xu, J., & Piao, C. (2018). Energy-efficient UAV control for effective and fair communication coverage: A deep reinforcement learning approach. IEEE Journal on Selected Areas in Communications, 36(9), 2059–2070.
Lu, H., Li, Y., Mu, S., Wang, D., Kim, H., & Serikawa, S. (2018). Motor anomaly detection for unmanned aerial vehicles using reinforcement learning. IEEE Internet of Things Journal, 5(4), 2315–2322.
Mowla, N. I., Tran, N. H., Doh, I., & Chae, K. (2020). AFRL: Adaptive federated reinforcement learning for intelligent jamming defense in FANET. KICS Journal of Communications and Networks, 22(3), 244–258.
Munaye, Y. Y., Lin, H.-P., Adege, A. B., & Tarekegn, G. B. (2019). UAV positioning for throughput maximization using deep learning approaches. Sensors, 19(12), 2775.
Osco, L. P., et al. (2021). A CNN approach to simultaneously count plants and detect plantation-rows from UAV imagery. ISPRS Journal of Photogrammetry and Remote Sensing, 174, 1-17.
Wang, D., Li, W., Liu, X., Li, N., & Zhang, C. (2020). UAV environmental perception and autonomous obstacle avoidance: A deep learning and depth camera combined solution. Computers and Electronics in Agriculture, 175, 105523.
Wu, Q., Zeng, Y., & Zhang, R. (2018). Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Transactions on Wireless Communications, 17(3), 2109-2121.
Xiao, L., Wan, X., Dai, C., Du, X., Chen, X., & Guizani, M. (2018). Security in mobile edge caching with reinforcement learning. IEEE Wireless Communications, 25(3), 116–122.
Zeng, Y., & Zhang, R. (2017). Energy-efficient UAV communication with trajectory optimization. IEEE Transactions on Wireless Communications, 16(6), 3747-3760.
Zhang, H., & Hanzo, L. (2020). Federated learning assisted multi-UAV networks. IEEE Transactions on Vehicular Technology, 69(11), 14104–14109.
Zuo, K., Cheng, X., & Zhang, H. (2021). Overview of obstacle avoidance algorithms for UAV environment awareness. In Proceedings of IOP Publishing Journal of Physics Conference Series.